За последние пять лет число промышленных роботов в мире выросло на 85%, а спрос на специалистов по программированию робототехнических систем увеличился втрое. Программирование — мозг любого робота: без кода машина остаётся набором деталей, не способных принимать самостоятельные решения.

В этой статье разберём, какие языки используют в робототехнике и программировании — C++ (42%), Python (38%), Assembly, Java, MATLAB, Rust, — чем они различаются, какие подходы и парадигмы применяют разработчики, на каких платформах можно запрограммировать робота и с чего начать.
Робототехника — прикладная наука о создании, проектировании и программировании роботов. Охватывает промышленность, медицину, быт, космос, логистику и транспорт. Само слово «робот» ввёл чешский писатель Карел Чапек в 1920 году в пьесе «R.U.R.» — от чешского robota («принудительный труд»). Термин «робототехника» появился позже: в 1941 году его использовал Айзек Азимов в рассказе «Лжец».
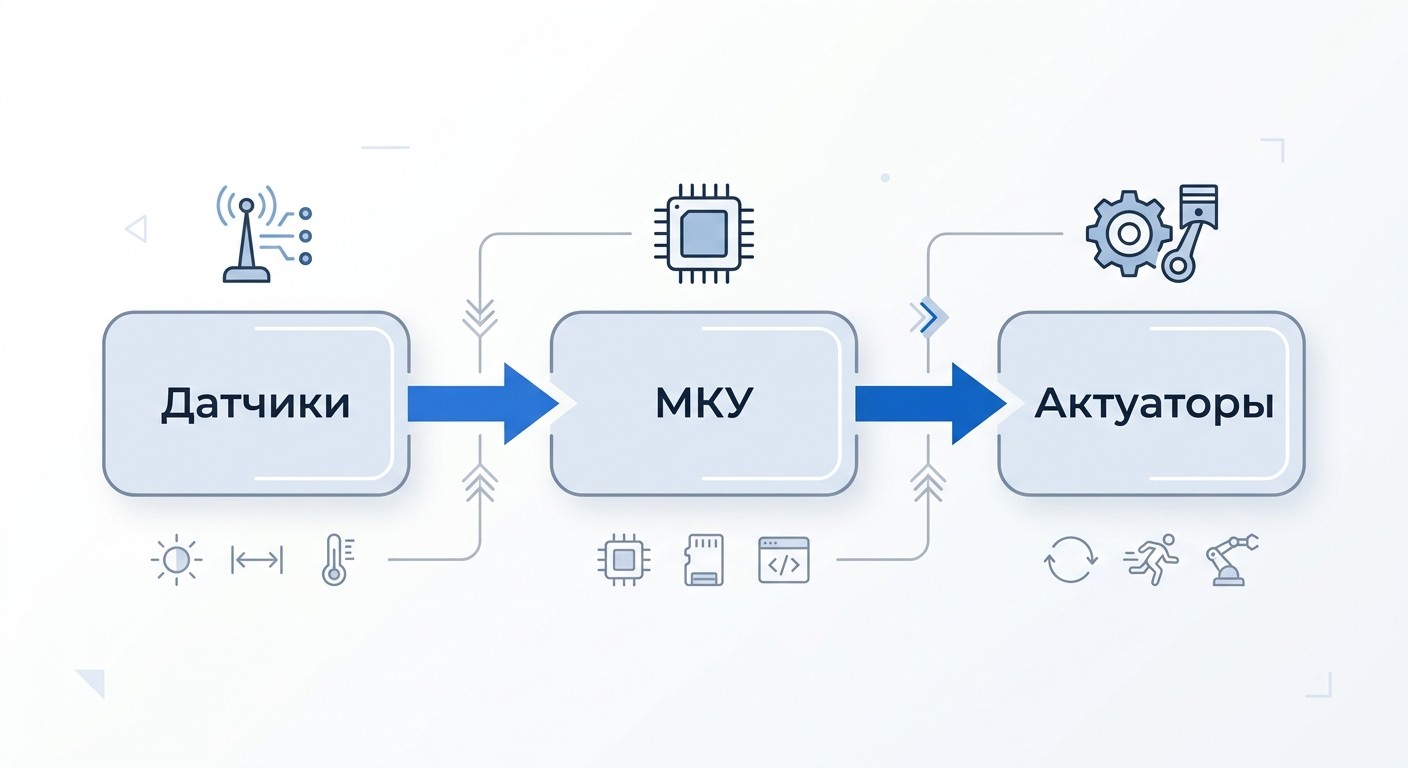
Любой робот — это система из пяти взаимосвязанных компонентов: интерфейс оператора, подвижность (механика перемещения), манипуляторы (руки, захваты), ощущения и восприятие (датчики), программирование. Убери последнее — и робот превращается в механическое устройство без возможности самостоятельно реагировать на среду. Датчики собирают данные из физического мира, микроконтроллер их обрабатывает, актуаторы исполняют команды.
Три ключевых отличия от разработки обычного ПО:
Системная цепочка выглядит так: датчик → данные → управляющий код → актуатор. Для разработки используют специальные IDE с визуальными инструментами, симуляторы вроде Gazebo и специализированные библиотеки.
Развитие робототехники укладывается в несколько ключевых дат: 1920 — термин «робот» (Чапек), 1927 — первый андроид «Телевокс» компании Westinghouse Electric, 1941 — термин «робототехника» (Азимов), 1959 — первый промышленный робот Unimate в США, 1968 — компания Kawasaki начинает производство роботов в Японии. За сто лет управление роботами прошло путь от механических реле до многоуровневых программных стеков: современные беспилотные роверы работают на связке C++ и Python.
Языки делятся по уровню абстракции: низкоуровневые (Assembly, C) максимально близки к железу; среднеуровневые (C++) сочетают производительность с удобством; высокоуровневые (Python, Java, MATLAB) проще в разработке, но медленнее в исполнении. Большинство профессиональных проектов используют связку: C++ отвечает за производительность, Python — за высокоуровневую логику и машинное обучение.
| Язык |
Уровень |
Доля 2023 |
Тренд |
Применение |
Платформы |
|---|---|---|---|---|---|
| C++ | Средний | 42% | Стабильный | Real-time управление, ROS | Arduino IDE, STM32 |
| Python | Высокий | 38% | ↑ Растёт | ML, прототипирование, CV | Raspberry Pi |
| C | Низкий | 12% | ↓ Снижается | Встроенные системы | MCU общего назначения |
| Rust | Средний | 4% | ↑↑ Быстро растёт | Безопасные критичные компоненты | Embedded |
| Java | Высокий | 3% | ↓ Снижается | Корпоративные роботы | Android-платформы |
| MATLAB | Высокий | — | Стабильный | Моделирование, инженерные вычисления | ПК |
| Assembly | Низкий | — | ↓ Снижается | Максимальная производительность | MCU |
C++ занимает 42% всех робототехнических проектов, C — ещё 12%: в сумме более половины всей разработки. Главная сила — максимальная производительность для задач реального времени, прямой доступ к GPIO и микроконтроллерам, поддержка объектно-ориентированного программирования для сложных архитектур.
Слабость — высокий порог входа: сложный синтаксис и ручное управление памятью означают, что одна ошибка способна нарушить работу всей системы. Стандартная среда — Arduino IDE для MCU-разработки. Ядро ROS написано на C++.
Профессиональный паттерн выглядит так: C++ берёт на себя performance-критичные модули (управление моторами, обработка сигналов датчиков), Python — высокоуровневую логику и ML-компоненты.
Python занимает 38% рынка с растущей динамикой↑. Низкий порог входа делает его отличным выбором для обучения и прототипирования.
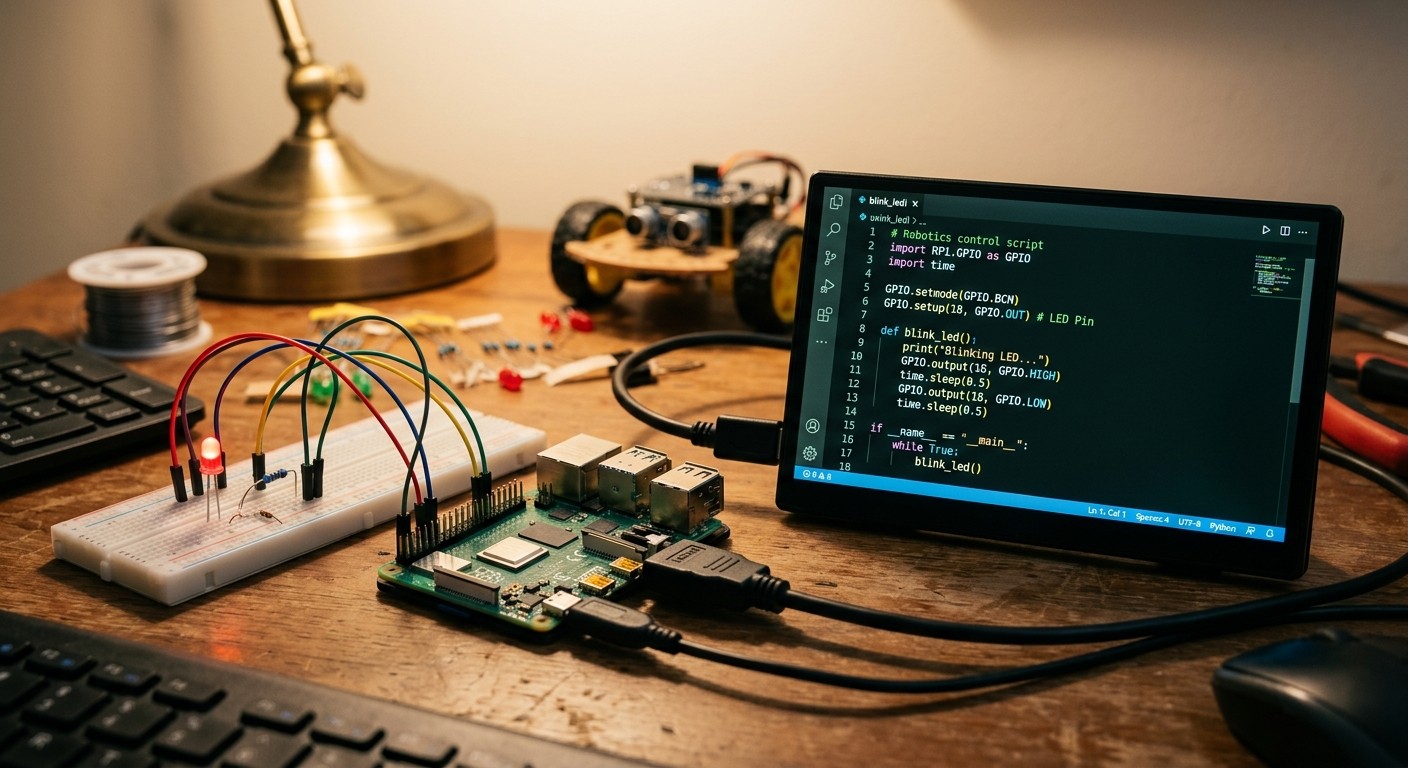
Ключевые библиотеки для программирования роботов на Python: OpenCV (компьютерное зрение и навигация), PyTorch и TensorFlow (машинное обучение и нейронные сети), RPi.GPIO (управление пинами Raspberry Pi). Стандартная платформа — одноплатный компьютер Raspberry Pi. Слабость: Python медленнее C++ в задачах реального времени и уступает ему в прямом аппаратном контроле — именно поэтому в профессиональной разработке оба языка используют вместе.
Assembly — язык, ближайший к машинному коду. Максимальный контроль и минимальное потребление памяти при крайне высокой трудоёмкости разработки. Тренд снижающийся: Assembly применяют только там, где другие языки не справляются с требованиями по скорости или объёму памяти.
Java — 3% проектов. Переносимость через JVM (виртуальную машину Java) делает его привлекательным для корпоративных роботов и Android-платформ. Тренд нисходящий.
MATLAB — инструмент инженеров для математического моделирования, обработки сигналов и компьютерного зрения. Платное ПО; open-source (с открытым исходным кодом) альтернатива — GNU Octave.
Rust — 4% и быстро растёт↑↑. Обеспечивает безопасность памяти без потери производительности, что делает его перспективным для критически важных компонентов: беспилотников, медицинских роботов и промышленных систем.
Выбор парадигмы определяется задачей: предсказуемая среда требует одного подхода, адаптивная — другого. Ни один конкурентный материал не собирал парадигмы в единый структурированный раздел — ниже восполним этот пробел.
Конвейерный (pipeline) подход — последовательная обработка данных в пять этапов: сбор данных с датчиков → анализ состояния среды → моделирование → планирование траектории → управление актуаторами. Применение: предсказуемые задачи с чётко определённой средой — промышленный сварочный манипулятор, робот, движущийся по линии на складе.
Биологический подход имитирует нейронную активность мозга. В 2016 году роботы впервые научились захватывать объекты произвольной формы без явного программирования правил — именно за счёт этого подхода. Инструменты: TensorFlow, PyTorch, глубокие нейронные сети с GPU-ускорением.
Применение: распознавание объектов, адаптация к изменяющейся среде, поведение по аналогии с живыми существами.
Смешанный подход объединяет конвейерное планирование и биологическое обучение. Именно так устроены наиболее «умные» современные роботы — они и следуют заданному алгоритму, и адаптируются к непредвиденным ситуациям.
Реактивный подход работает без внутреннего плана: действие — прямой ответ на стимул. Пример — роботы-пылесосы: сенсор фиксирует препятствие, робот немедленно меняет направление.
Поведенческий подход (Behaviour-based, разработан Родни Бруксом в MIT) строится на наборе параллельных независимых поведений, которые конкурируют или кооперируются в реальном времени.
| Платформа |
Уровень |
Языки |
Целевая аудитория |
|---|---|---|---|
| Scratch | Начальный | Блочный | Дети 6–10 лет |
| LEGO EV3 / WeDo | Начальный | NXT-G, PyBricks, Scratch | Школьники 6–14 лет |
| Arduino IDE | Начальный–средний | C++ | Подростки, любители |
| Raspberry Pi | Средний | Python | Прототипирование, IoT |
| ROS | Продвинутый–экспертный | C++, Python | Профессионалы, исследователи |
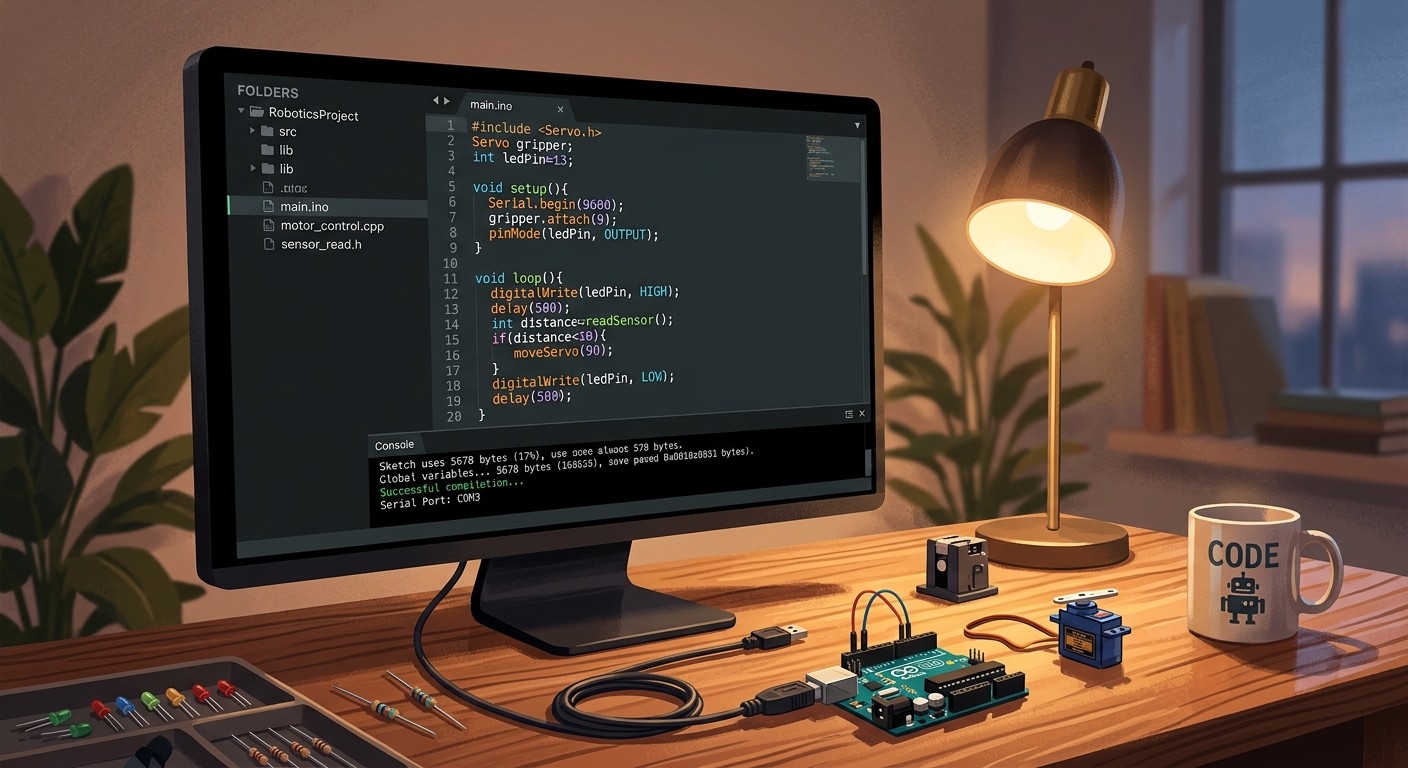
Arduino — экосистема микроконтроллеров (MCU), стандартный инструмент для встраиваемой разработки. Язык — C++. Главные преимущества: обширная библиотека готовых модулей для датчиков и актуаторов, крупнейшее сообщество в embedded-разработке.
Raspberry Pi — одноплатный компьютер, а не микроконтроллер. Ключевое различие: Raspberry Pi запускает полноценную операционную систему и обрабатывает сложные вычисления; Arduino управляет железом в реальном времени с минимальной задержкой. Для прототипирования и IoT-проектов Raspberry Pi + Python — стандартная пара.
ROS (Robot Operating System, операционная система для роботов) — фреймворк, а не полноценная ОС. Обеспечивает аппаратную абстракцию, обмен сообщениями между компонентами и управление пакетами.
Архитектура строится на трёх понятиях: nodes (независимые процессы), topics (каналы обмена данными), services (запросы и ответы). Модульность позволяет командам разрабатывать и тестировать компоненты параллельно. Переход на ROS при создании робота-инспектора трубопроводов сокращает время разработки на 60% за счёт готовых пакетов и стандартизированных интерфейсов.
Инструменты экосистемы: Gazebo (симулятор с высокоточной физической моделью; альтернативы — Webots, CoppeliaSim), MoveIt (планирование движений, инверсная кинематика), RViz (3D-визуализация данных), Navigation Stack.

LEGO Mindstorms EV3 — образовательная платформа для школьников. Языки: NXT-G (графический) и PyBricks — реализация Python для EV3. Платформа используется в школьных курсах по робототехнике и на соревнованиях.
LEGO WeDo 2.0 — набор для детей 6–8 лет. Программирование блочное, совместимо со Scratch. Даёт первое понимание логики «если — то» без написания кода.
Путь обучения выстраивается ступенями: WeDo 2.0 (Scratch) → EV3 (PyBricks) → Arduino C++ → Python + ROS.

Каждый крупный производитель создаёт собственный язык программирования и среду разработки с модулями расширений под конкретные задачи.
| Производитель |
Язык |
Метод |
Область применения |
|---|---|---|---|
| KUKA | KRL | Online + Offline | Автомобильная пром., сварка |
| ABB | RAPID | Online + Offline | Сборка, покраска |
| Yaskawa | INFORM | Online + Offline | Точечная и дуговая сварка |
| Fanuc | KAREL | Online + Offline | Электроника, автомобили |
Online-программирование выполняется непосредственно на роботе. Два метода: Teach-In — оператор управляет роботом через консоль или джойстик, задавая ключевые точки траектории; Playback — инженер вручную проводит манипулятор по нужному маршруту, система записывает движение. Минус обоих вариантов — остановка производственного процесса.
Offline-программирование ведётся на компьютере без участия физического робота. Не прерывает производство; позволяет заранее проработать траектории, логику и условия безопасности. На практике оба метода применяются параллельно. Требования к безопасности промышленных роботов регламентирует международный стандарт ISO 10218.
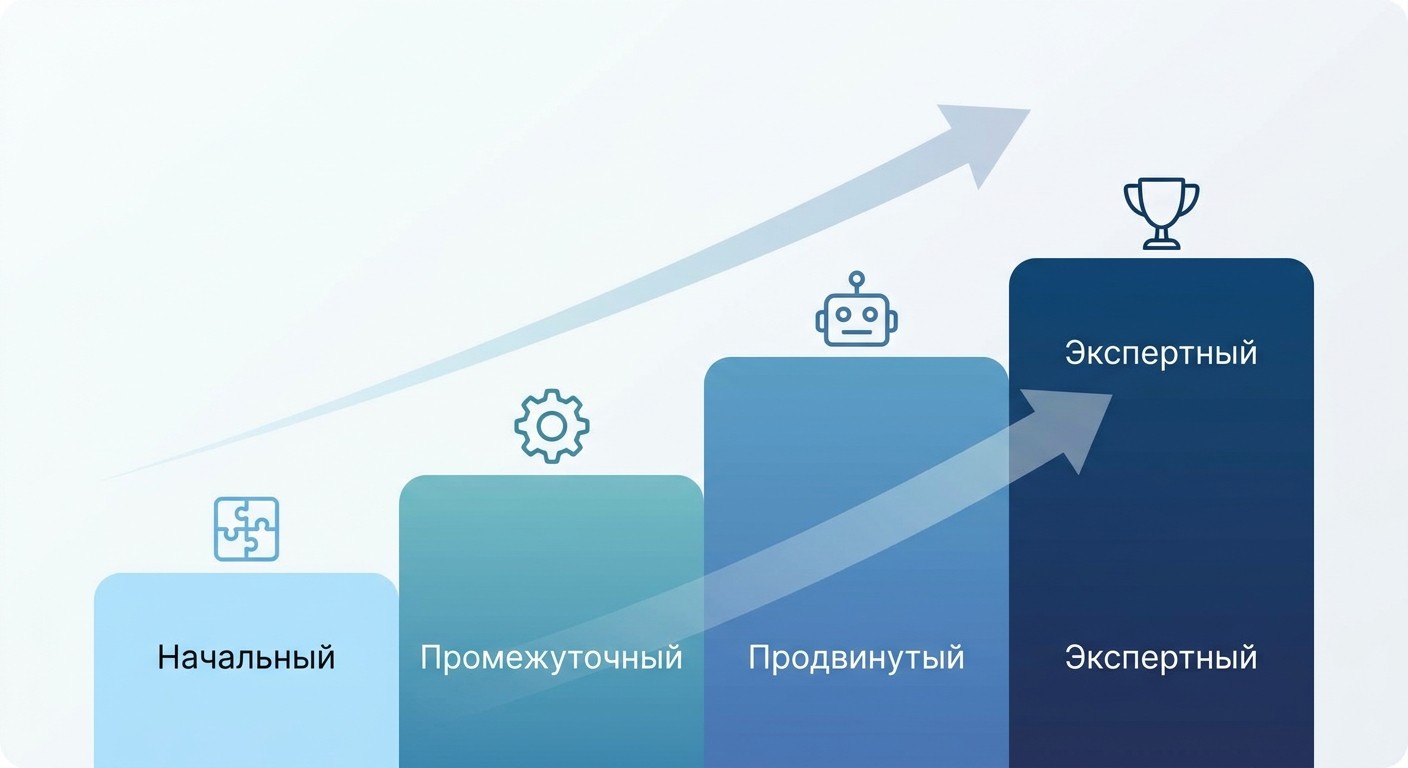
Обучение робототехнике и программированию делится на четыре уровня:
На начальном уровне достаточно Arduino и базового C++. На следующем — Python для обработки данных и прототипирования. Курс «Программирование: Уверенный старт» охватывает именно этот переход: Python, основы C++/Arduino, 36 часов, четыре реальных проекта в портфолио.
Программирование — «мозг» робота. Без кода машина не способна принимать самостоятельные решения. Разработчик задаёт алгоритм: сбор данных с датчиков → анализ → команда актуаторам. Ключевое отличие от классического ПО: код работает в режиме реального времени и взаимодействует с физическим миром напрямую.
Это взаимозависимые дисциплины. Механическая конструкция без кода — набор деталей. Программа без «железа» — абстракция. Профессиональный разработчик роботов понимает оба аспекта: языки (C++, Python) и базовую электронику (датчики, актуаторы, микроконтроллер).
Для начала — Python (38% проектов, низкий порог входа, Raspberry Pi) или Arduino C++ (стандарт MCU-разработки). Python проще и идеален для ML-задач. C++ обязателен для прямой работы с микроконтроллерами в реальном времени. Профессионалы используют оба языка в паре: C++ для производительности, Python для логики и нейросетей.
ROS — фреймворк, а не операционная система. Он стандартизирует компоненты, обеспечивает обмен данными между модулями и сокращает время разработки на 60%. Необходим для профессиональных и исследовательских проектов. Для учебных роботов достаточно Arduino IDE.
Четыре основных: конвейерная (пять последовательных шагов от сенсора до действия), биологическая (нейросети и машинное обучение), реактивная (прямой ответ на стимул без внутреннего плана) и поведенческая (параллельные независимые поведения). Современные роботы чаще всего применяют смешанный подход.
Крупные производители используют собственные языки: KUKA — KRL, ABB — RAPID, Yaskawa — INFORM. Методы программирования: online (Teach-In — управление через консоль; Playback — ручная проводка с записью) и offline (на компьютере без остановки производства). Оба метода применяются параллельно в зависимости от задачи.
Для 6–8 лет — LEGO WeDo 2.0 (блочное программирование, Scratch-совместимый). Для школьников 10–14 лет — LEGO Mindstorms EV3 с переходом к Python/PyBricks. Для подростков 14+ — Arduino IDE (C++) или Raspberry Pi (Python). Главный принцип — начинать с видимого результата: движение, свет, звук.
Да. Для этого существуют специализированные симуляторы: Gazebo (тесная интеграция с ROS, высокоточная физическая модель), Webots (кроссплатформенный, бесплатный), CoppeliaSim. Они позволяют отлаживать алгоритмы в виртуальной среде — без риска повреждения оборудования и без затрат на физические компоненты.
Три проверенных пути в зависимости от возраста и цели:
Хотите пройти путь от нуля до реальных проектов на Python, C++ и Arduino? На курсе «Программирование: Уверенный старт» школьники за 36 часов создают Telegram-бот, веб-приложение и прототип умного устройства на Arduino — бесплатно, онлайн, с гибким расписанием. Узнайте подробнее на странице курса.